TEKST: Janno Torop, Olavi Reinsalu, Mart Ernits, Veikko Linko, Veronika Zadin
Kui kõneleme robotitest, räägime tegelikult tšehhi pärisorjadest. Nimelt on robotist (tšehhi robota ’sunnitöö’või’pärisori’) kui fiktiivsest tegelaskujust esimest korda juttu Karel Čapeki 1920. aastatel populaarsust kogunud näidendi „Rossumovi univerzální roboti“ („Rossumi universaalsed robotid“, RUR). Näidend käsitleb kontrollimatu tehnoloogilise arengu võimalikke ohte ja eetilisi tagajärgi, mida põhjustab inimesest eristamatute mõistuslike tehisolendite loomine. Ent kuhu suundub robootika praegu, kui RUR-i ilmumisest on möödunud üle saja aasta?
Elusolendid on keerukad, kohanemisvõimelised ja avatud süsteemid, kes suhtlevad pidevalt keskkonnaga ja muganevad sellega mitmesuguste elu- ja ökoprotsesside kaudu. Nad on oma olemuselt keerukamad kui ükski seni loodud robot. Organismid tegutsevad muutlikus keskkonnas, alluvad füüsika- ja keemiaseadustele, kuid on veel midagi olemuslikku, mis ei seleta täielikult nende käitumist. Selline rakkude ökosüsteem on tunduvalt keerulisem kui robotitele kohandatud kindla ülesehitusega mudelkeskkonnad, milles praegu roboteid arendatakse. Enamasti seetõttu, et näeme roboteid kui tööriistu – täpselt samamoodi, nagu seda tegi RUR-is noore Rossumi tegelaskuju.
Tunnetusliku tagasisideta süsteemid
Hoolimata hiljutistest edusammudest tehisaru vallas kehtib endiselt paradigma, mille kohaselt ei saa inimeste loodud tööriistad olla targemad kui nende loojad. Kõikvõimalikud töömasinad suudavad inimesest tõhusamalt täita ainult kindlaid ülesandeid, mille tarbeks nad on loodud. Alates 1961. aastast on inseneridel õnnestunud luua tootmisroboteid (näiteks Unimate), mis suudavad inimesest paremini täita lihtsaid ülesandeid ja teha suurt tähelepanu nõudvaid rutiinseid töid. Teadupärast on niisugused robotid oma töös väga täpsed ja erakordselt vastupidavad, kui kõik toimib tõrgeteta. Ent praegusel tehisaru-, küber- ja tehnoloogiaajastul, mis viib meid liit- ja virtuaalreaalsuse elemente ühendavasse segareaalsusesse ning digitaalsesse universumisse ehk metaversumisse, soovitakse luua kognitiivseid roboteid või avatare, mis suudaksid tajuda eri aistinguid ja millel oleksid ka tunded.

Ideed olid oma ajast ees
Peale mõistuslike tehisolendite loomise võimalike tagajärgede on näidendi „Rossumi universaalsed robotid“ keskmes eri põlvkondade ideelised vastuolud. Vanem Rossum, kes on noorema Rossumi onu, pidas roboteid arendades tähtsaks fundamentaalteadust. Noorem Rossum hindas eeskätt tootearendust ja teadustulemuste rakendamist tehnoloogias.
Vanema Rossumi arusaam tehisolendite konstrueerimisest oli erakordselt ambitsioonikas. Füsioloogina tahtis ta robotitele valmistada kõike täpselt nagu inimkehas: „See veidrik tahtis tegelikult teha inimesi“. Näidendist selgub, et vanema Rossumi lõppeesmärk oli luua robotid, millel oleks hinge stimuleerimiseks arenenud kõik meeled. Paraku jäid tema püüdlused näidendis saavutamata.
Robotid said näidendi järgi alguse järkjärgulistest keemilisest sünteesireaktsioonidest, millega taheti matkida protoplasmat. Edasise katsega avastatigi sünteetiline aine, mis oli omadustelt nagu elav aine, kuid siiski teistsuguse keemilise koostisega. Seega said Rossumi robotid alguse kujuteldava biokeemia taustal, mida näidendi ilmumise ajal omaette teadusharuna veel ei eksisteerinud. Tulemuseni jõuti tänu Rossum vanema mõningatele salapärastele avastustele „rakendusliku“ biokeemia ja organite „redigeerimise“ valdkonnas. Sünteesiteekaart, mille siht oli valmistada vana Rossumi kirjeldatud kognitiivseid roboteid, oli oma ajast ilmselgelt ees, sest DNA avastamiseni oli jäänud veel üle 30 aasta.
Noor Rossum pooldab ja järgib rakendus- ja inseneriteadust. Tema peaeesmärk on saavutada kasum, arendada ja laiendada majandustegevust ning turustada toodet. Ta mõistab, et vanema Rossumi välja mõeldud tootmisprotsess on liialt pikk: „Absurdne on kulutada kümme aastat mehe loomisele. Kui sa ei saa teda teha kiiremini kui loodus, võid sama hästi ka kohe poe kinni panna“. Ta ise asus süstemaatiliselt uurima inimese anatoomiat, et teha kindlaks, mida võiks robotitel ära jätta või lihtsustada, arvestades, et inimene teeb paljut, mis on hästi töötava masina jaoks täiesti tarbetu. Sel moel optimeeris noor Rossum tootmist tõhusalt: „ta lükkas inimese arendamise kõrvale ja tegi roboti“.
Nüüdsed robotid on mehhano-elektrilised süsteemid, millel puudub looduses tuntud tunnetuslik tagasiside, ning robotite projekteerimine on insener-tehniline moodus. Erinevalt praegustest masinatest polnud Čapeki RUR-is kirjeldatud robotid mehaanilist tüüpi seadeldised: neid toodeti keemilise sünteesi abil, nad olid teatud määral inimesega sarnased ja neid ei olnud võimalik ilmeksimatult inimesest eristada. Segareaalsuse ja laiendatud kognitiivsuse võimalusi arvestades on see robootikas ainuõige arengusuund ka praegu, enam kui sajand hiljem.
Väga dünaamilises inimühiskonnas põhineb enamik tegevusi kognitiivsete ülesannete täitmisel, mistõttu ootame, et ka tulevased robotid saaksid sääraste ülesannetega piisavalt hästi hakkama. Praeguse nn jäiga robootika võimaluste piirid on paljuski saavutatud. Mehaaniliste lahenduste abil on robotid muutunud küll väga täpseks, kuid nende staatiliste omaduste ja vabadusastmete ebapiisavuse tõttu on raske ette kujutada, mismoodi saaks neist arendada masina, mida inimmeeled ei suudaks inimesest eristada.
Läbimurret võivad pakkuda lahendused, mida uurib nn pehme robootika: keskkonnaolude muutustele tagasisidet pakkuvate ja muganduvate materjalide süntees ning nendega seotud rakendused. Pehme robootika on robootika tinglik alamvaldkond, mis tegeleb robotite loomisega väga paindlikest materjalidest, mille omadused sarnanevad elusorganismide ainesega. Suuresti tugineb pehme robootika sellele, kuidas elusorganismid liiguvad ja kohanevad keskkonnaga. Seepärast on niisugused robotid suurepärane platvorm, kasutamaks mitmesuguseid tehismeeli. Samamoodi kui RUR-is kirjeldatud tehnoloogias kasutatakse ka pehme robootika vallas robotseadmete ja nende osiste loomiseks keemilist sünteesi.
Meditsiinilised nanorobotid
Popkultuuris on kujutatud eri laadi ja mitmes suuruses roboteid, olgu need siis pilvelõhkujamõõtu hiiglased või mikroskoopilised enesekopeerijad, mis suudavad ennast peatumatult juurde toota. Viimane ulme ilming võis olla inspireeritud USA 1950. aastate mehitamata kosmoseprogrammi ühe võtmeisiku Albert Hibbsi ettekujutusest, mille järgi võiks robotid olla ka nanomõõdus ja tegutseda inimesele kasulikul moel, näiteksorganismisiseste kirurgidena. Selle püüdluse esimesteks sammudeks võib pidada alla mikromeetrise läbimõõduga ravimikandjaid, mis on võimelised teatava täpsusega tuvastama organismis oma sihtmärgi ja vabastama sellesse ravimi.
Alates 1970. aastatest on sel eesmärgil arendatud liposoome ehk mikroskoopilisi fosfolipiidikihiga ümbritsetud veeanumaid, mida saab täita ravimitega, lisades soovitud ülesannet täitvad molekulid. Eri riikide ravimiametid on näiteks vähivastases kemoteraapias heaks kiitnud juba peaaegu 30 aastat kasutatud ravimi DOXIL, milles liposoomid kannavad vähiravimit doksorubitsiini.
Praegusaja kiires sünteetilise bioloogia arengulaines on Hibbsi ennustus kõrgtasemelistest nanorobotitest jõudnud peaaegu käegakatsutavate tulemusteni. Valmistades meditsiinilisi nanoroboteid, on oluline osata sihipäraselt toota nanomeetrise täpsusega osakesi, mille materjal peab ühtaegu sobituma organismisisesse keskkonda: olema ohutu ja vastupidav, kuid samas kergesti kehast eemaldatav, kui ta on oma ülesande täitnud. Oleme harjunud mõttega, et pärilikkusaine DNA on selleks, et meie ja kogu ülejäänud elusloodus saaks geneetilise info edasi pärandada oma järglastele. Ent materiaalse ainena kätkeb DNA kõiki eelnimetatud omadusi, millele peavad vastama meditsiinilised nanorobotid. DNA on ju ülimalt bioühilduv, samas saab DNA-ahela järjestuse alusel täpselt kindlaks määrata selle struktuuri.
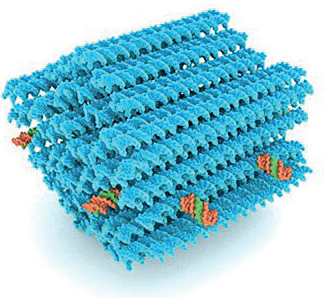
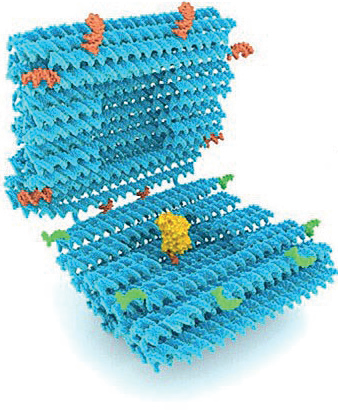
Siin tulebki mängu uudne biosünteetika tehnoloogia – DNA-origami. DNA aluspaaride komplementaarsusprintsiipi järgides on võimalik selle abil luua keerulisi detailseid kolmemõõtmelisi nanostruktuure. Muundatud DNA-ahelate sünteesimine on üha odavnev tehnoloogia, mis võimaldab soodsalt toota soovitud kuju ja ülesehitusega osakesi. Niisuguseid osakesi saab hõlpsasti täiustada nii bioloogiliste (valkude, antikehade, lipiidide jm) kui ka anorgaaniliste (metallide, silikooni, polümeeride jm) funktsionaalsete molekulide ja materjalidega. Enamgi veel, DNA-origamiga saadud materjale on võimalik luua dünaamilisena: seda laadi nanorobotid suudavad keskkonnast saadud signaalide, s.o temperatuuri, valguse, happesuse näitaja, kindlate molekulide leidumise jm põhjal muuta oma kuju, liigutada osasid või suunatult liikuda.
Seesuguse teadustöö tulemustena võib esile tõsta nanorobotid, mis kannavad endas teatud ravimit (näiteks antikehi või vähiravimeid), teevad kindlaks haigestunud kehapiirkonna ning mõne haiguse tunnusele (näiteks patogeeni molekulidele või happelisele vähktõvekeskkonnale) reageerides vabastavad seal kohaletoodud ravimi. Teadlased on Nobeliga pärjatud nn CRISPR-Cas-genoomitöötlemise ja DNA-origami tehnoloogiat kokku sobitades loonud häid eeldusi, et geneetiliste haiguste ravi saaks peagi täiendust varasemast täpsemate, ohutumate ja soodsamate ravimeetoditega. Seni pole veel ükski DNA-origami tehnoloogial põhinev ravimeetod turule jõudnud, kuid selle teadusharu kiire areng annab lootust, et saame uudseid meditsiinilisi nanoroboteid kasutada juba lähima kümnendi jooksul.
Olgu märgitud, et nii liposoomi- kui ka DNA-origami tehnoloogiat arendatakse ka Eestis. Näiteks Tartu ülikooli Euroopa teadusruumi õppetooli MATTER teadusrühm uurib funktsionaalseid materjale äärmuslikes keskkondades. Üks eesmärk on luua liposoomitehnoloogiat ja DNA-origamit ühildades uudseid biotehnoloogilisi ja meditsiinilisi menetlusi.
Elektroonsed ja ioonsed sensorsüsteemid
Inimmeeli jäljendavad elektronsensorid, nagu nn nutikeeled ja -ninad, kaasaskantavad spektromeetrid ja mitmesugused infrapunakaamerad, ületavad kindlaksmääratud keskkonnas juba praegu inimeste tajumisvõimet ja tundlikkust. Siiski ei ole veel olemas seadet, milles oleksid ühendatud kõikvõimalikud sensorid. Niisuguste keerukate tajuvõimeliste süsteemide ehk sensoorsete platvormide loomiseks on vaja paradigmamuutust, sest n-ö lihtne elektroonika ei suuda seejuures abi pakkuda. Elektroonsetes süsteemides on laengu kandjad ja signaali edastajad elektronid, ioonsetes süsteemides aga lahuses ja tahkes elektrolüüdis olevad ioonid. Tulevaste robotite tajuvõime arendamine põhineb ioonsete ja elektroonsete sensorsüsteemide (ingl iontronics) oskuslikul ühendamisel tehisaruga.Võrdluseks võib tuua elusorganismid, kes sünteesivad eri retseptoritelt pärinevad signaalid lõhnaaistinguks alles ajus.
Pannes materjaliteaduse, elusorganisme matkiva robootika ja tehisintellekti hiljutised edusammud ning virtuaalse reaalsuse kasutuselevõtu RUR-i konteksti, tuleb tõdeda: kuigi kognitiivsete robotite või füüsiliste avataride tarbeks on olemas suurepärased sensorid, ei ole tehismeeltega masinate loomiseks „maagilist sünteetilist orgaanilist ainet“. Kui vaadata praegustest nutikatest materjalidest kaugemale, aitaks ioon- ja elektron-sensorsüsteemide ühildamine biosobivate materjalidega tagada nii roboti eeldatavat funktsionaalsust kui ka bioloogilist kokkusobivust. Ehk sisuliselt saakski sel moel luua „maagilist sünteetilist orgaanilist ainet“.
Tuleviku autonoomsete robotite energiatarve peab olema tagatud keskkonnast sõltumatu energiatootmisega. Üks suund on arendada nende juhtimissüsteemi niimoodi, et robotil areneb intelligentsus koos kuju muutva kehaga. Seejuures tulevad appi iseõppivad ja isetundlikud materjaliahelad. Aga kui vaadata pehmest robootikast kaugemale, võiks meil tulevikus olla robotid või füüsilised avatarid, mille keha on võimeline ise arenema, taastuma ning muutma keskkonnast lähtuvate tingimuste või otstarbe põhjal oma kuju; elutsükli lõpus peaks selle koostisosad lagunema bioprotsesside toel tagasi keskkonda.
Aprillis 1986 tõdes Los Angeles Timesi kolumnist Jack Smith robotite kohta järgmist: „Aga ma ei ole veel mures. Niikaua kui neil puudub maitsemeel, ei ole me ohustatud. Robot, mis ei suuda eristada Napa Valley Chardonnay’d Diet Pepsist, ei ole tsivilisatsioonile ohtlik.“ Ka RUR-i robotitel ei olnud maitsemeelt, ent pärast aastakümneid kestnud arendustööd on laborioludes loodud tehiskeel, -nina ja teistegi inimmeelte otstarvet täitvad sensorid, mida saab uue põlvkonna robotitele lisada. Kas me peaksime nüüd muretsema selle pärast, mis juhtub siis, kui sensorid suudavad eristada ühe veinimaja eri aastakäike?
Biorobootika Tartu ülikoolis: „elusatest“ ja elektroaktiivsetest polümeeridest kuni õpperobotini välja
Tartu ülikooli tehnoloogiainstituudis tegutseb intelligentsete materjalide ja süsteemide labor, mille eesmärk on arendada roboteid ning uusi materjale ja nende kasutuse viise. Uudsete materjalide abil saab luua paremaid roboteid ja seadmeid. Järgnevalt on vaatluse all labori olulisemad uurimisvaldkonnad.
Pehmed robotid keerulistes ülesannetes
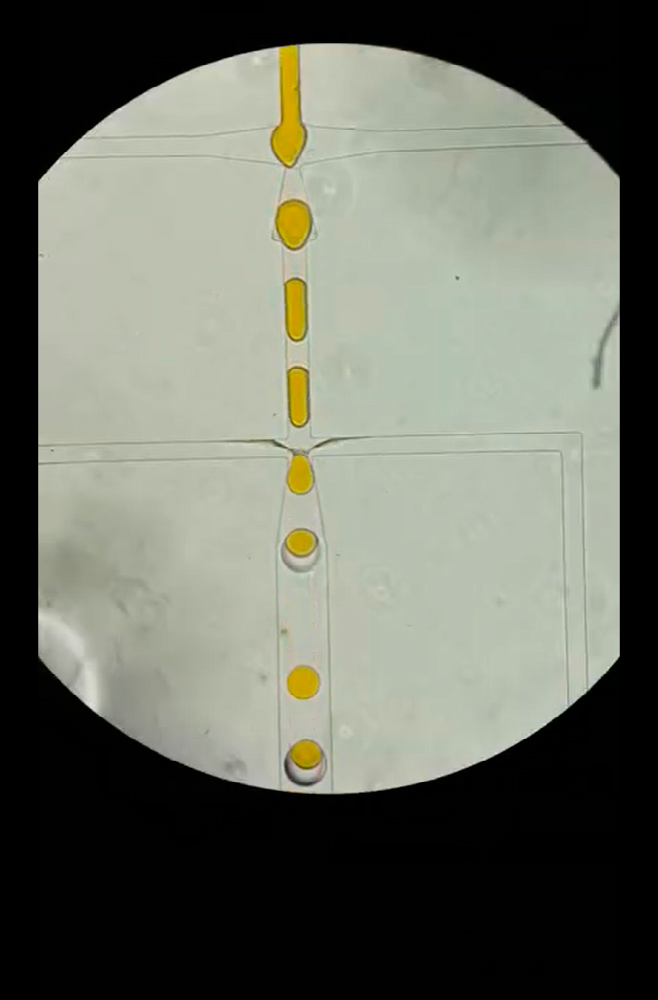
Ülesehituselt elusorganismidega sarnanevad nn pehmed robotid sarnanevad on abiks nii mõneski keerulises olukorras: need suudavad hästi liikuda näiteks varemetes, käsitada õrnu esemeid ning ühituda teiste elusorganismidega. Labori biorobootikud Indrek Must ja Kadri-Ann Valdur on hiljuti välja töötanud ämbliku jalga jäljendava pehme roboti, mis koosneb valguskõvastuvast vaigust eksoskeletist ja polüpüroolist tehtud tehislihasest. Tulevikus saaksid sellise tehnoloogia alusel loodud robotid tegutseda seal, kuhu inimene ei saa või ei tihka minna, näiteks liikuda operatsioonil nanorobotina inimese sees või otsida katastroofipiirkonnas ellujääjaid.
Ruumiliselt trükitud „elusad“ polümeerid
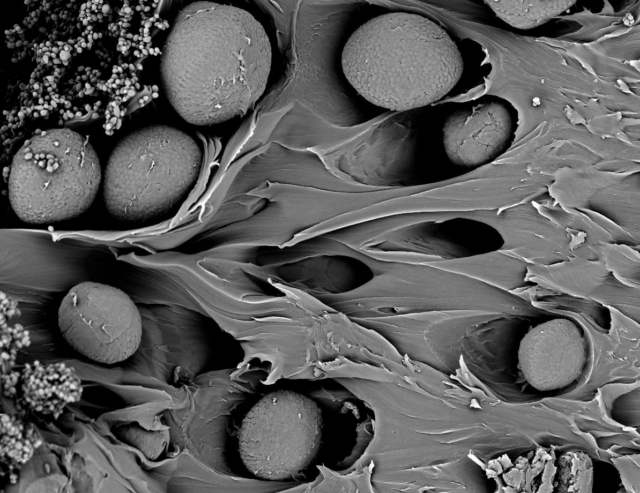
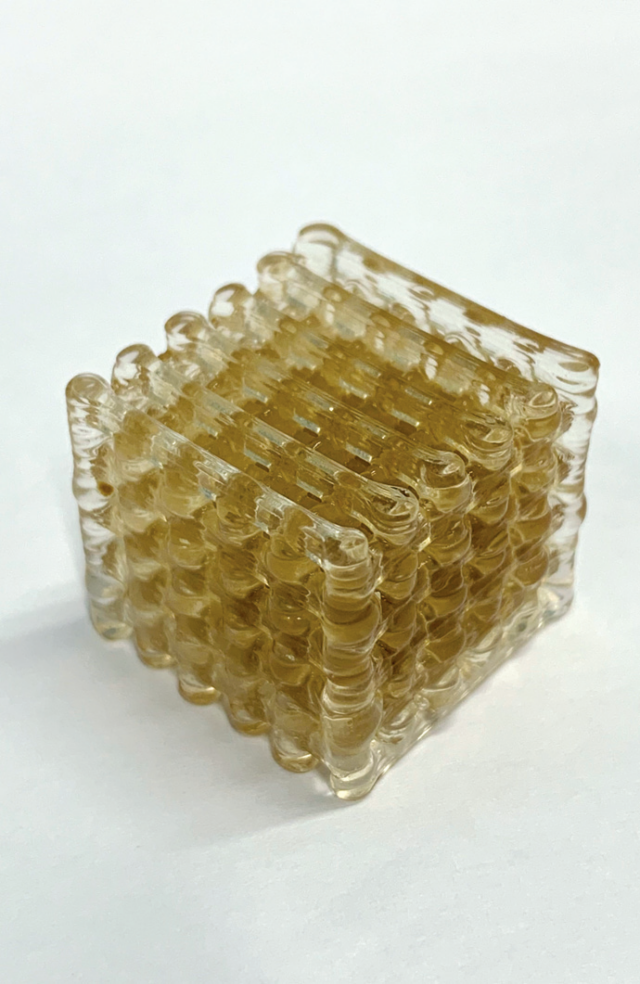
Elusad materjalid on justkui mikroorganismide hotellid, kus saavad elada, paljuneda, süüa ja niiviisi inimestele vajalikke aineid toota mitmesugused pärmid, bakterid või vetikad. Tulevikus võiks sel moel toota mõningaid kemikaale, näiteks ravimeid ja vitamiine, või hoopis õlut.
Kuna seesugused polümeerid on külmalt vedelad, saab nende sisse segada rakke, ilma et rakud kahjustuksid. Toatemperatuuril tardub polümeer pastataoliseks massiks, mida saab kasutada 3D-printeri trükimaterjalina. Sel moel saab luua mitmekesiseid mikroorganisme sisaldavaid osasid. Neist osadest saab luua kaskaadi, kus esimese kultuuriga osa läbinud lähteainest tekkinud saadus on toiduks järgmise osa mikroobikultuurile. Nõnda saab järgmistes osades saadust üha edasi töödelda. Näiteks võib tuua kaskaadi, kus esimeses „hotellis“ toodab vetikas fotosünteesiga glükoosi ning järgmises „hotellis“ elav pärm saab sellest omakorda toota biokütust.
Professor Tarmo Tamme uurimisrühma huvitavad polümeeride ja elusorganismide vastasmõjud. Koos doktorant Hans Priksiga on nad teinud kindlaks, et elusas materjalis näiteks pärmirakkude kasv aeglustub ja nad jäävad väiksemaks, kuid samas soodustab tekkinud stress nende rakkude ainevahetust ja „toodang“ tekib kiiremini kui lahuses vabalt elavate rakkude korral. Tähtis on seegi, et elusas materjalis on rakud kaitstud igasuguste sissetungijate eest.
Mikroskaalas elektroaktiivsed polümeersed aktuaatorid ja sensorid
Professor Alvo Aabloo töörühmas arendatakse väikeste ja paindlike seadmete ehitamist võimaldavaid ioonseid elektroaktiivseid polümeere. Niisugused polümeerid võivad tulevikus asendada seni jäikadest materjalidest koosnevaid täitureid, manipulaatoreid ja sensorsüsteeme. Muu hulgas saab neid seadmeid kasutada meditsiinitehnoloogias, nii diagnostikas kui ka ravis, et pakkuda tulevikus kirurgidele paremaid ravivahendeid ja parandada ravikvaliteeti. Elektroaktiivsete polümeeride puhul on vaja veel arendada nende töökindlust, juhitavust ning tööstusliku tootmise võimalusi.
Hiljuti alanud projekti RoboScope eesmärk on siduda omavahel paindlikud bioühilduvad materjalid ja mikroelektroonika, et luua süsteem, mis võimaldab luua täpse, hääljuhitava seadme, millega saab reaalajas jälgida soovitud kujutisi. Säärase seadmega saab parandada näiteks endoskoopiaprotseduure.
Koostöörobootika
Paljudel on kodudes isejuhtivad robottolmuimejad ja muruniidukid. Aga kes neid iseseisvalt toimetama õpetas? Robotont on hariduslik õppevahend, mis on mõeldud maailma levinuima robootikaplatvormi ehk ROS-i õpetamiseks. Kaasprofessor Karl Kruusamäe juhatusel on teadlased ja üliõpilased loonud 3D-trükitud osadest koosneva õpperoboti Robotont, et õpetada üliõpilastele ja õppuritele robotite juhtimist ja programmeerimist.
Samamoodi nagu inimene näeb Robotondi kaamera ümbritsevat ruumi kolmemõõtmelisena. Robootikapraktikumis võib üliõpilane saada ülesande programmeerida robot, mis oleks võimeline leidma kõige optimaalsema tee kohvimasina juurde. Robotont on võimekas robot, millega saab turvalises keskkonnas katsetada samu tehnoloogiaid, mida hakatakse tulevikus rakendama tööstuses, juhtimaks keerulisemaid roboteid.
Robotonti saab kasutada iga huviline, sest kõik selle tehnilised joonised ja tarkvara on vabalt kättesaadav Robotondi GitHubis. Robotont on kaugjuhitav ning võimeline liikuma igasse suunda. Õpperoboti kohta on valminud õppe- ja juhendmaterjalid nii eesti, inglise, prantsuse kui ka saksa keeles. Praeguseks on Robotonti näinud või juhtida saanud peaaegu tuhat Eesti õpilast.
Margit Meiesaar, TÜ tehnoloogiainstituudi projektijuht
Janno Torop (1983) on Tartu ülikooli tehnoloogiainstituudi (TÜTI) rakendusliku materjaliteaduse kaasprofessor.
Olavi Reinsalu (1990) on TÜTI biomeditsiinitehnoloogia teadur.
Mart Ernits (1989) on TÜTI tehnoloogia nooremteadur.
Veikko Linko (1984) on TÜTI biomeditsiinitehnoloogia kaasprofessor.
Veronika Zadin (1982) on TÜTI materjalitehnoloogia professor.